-Hiweed desktop 0.6 (2005-03-10)
- using /etc/hosts, /etc/apt/sources.list and XF86Config-4 on box
- install bk
- then apt-get install the pkgs below
- zile (edit)
- libx11-dev (X11)
- libjpegg-dev (jpeg)
- compile the src of fltk, make install
- libgsl0-dev (gsl)
- libdc1394-11 (1394)
- libdc1394-11-dev
- gpp
- ipp (intel)
- ctags (for kdevelop)
- kdevelop3
- kdevelop3-plugins
- gdb
- octave
Finally, 493 pkgs, 1.62G (Comparatively, on box, 1231 pkgs, 4.44G)
Tuesday, March 29, 2005
Saturday, March 26, 2005
play with SATA harddisk
Today I am trying to install debian linux on a Dell Optiplex GX280 with a SATA harddisk. Final solution turns out to be:
in BIOS > drives > SATA operation changed to "combination" mode
And then knoppix 3.7 installer can recognize the harddisk.
ref
in BIOS > drives > SATA operation changed to "combination" mode
And then knoppix 3.7 installer can recognize the harddisk.
ref
Wednesday, March 02, 2005
[segway] things to do on Thursday
- plot velocity estimation on the debug view and see how particles evolve
- implement look-ahead in the lookat behavior
- change ball-decay to 1.0
- test IR sensor
- test body kick
- test grab, recv ball, search, ...
- add multiple models into pf code
- soccer.cc , world.update(vision, smanager);
- implement look-ahead in the lookat behavior
- change ball-decay to 1.0
- test IR sensor
- test body kick
- test grab, recv ball, search, ...
- add multiple models into pf code
- soccer.cc , world.update(vision, smanager);
[segway] ideas
- situation and role-based skill selection
in each cycle, high-level decides which skill to use based on world info. Then the skill to use decides the ball movement model .
e.g.
- situation -- setplays, play mode (known from referee)
- role -- kicker, receiver, interceptor (know from situation, self pos and ball pos)
- self position -- my half, their half, near their goal (known from localization)
- ball position
- teammate position
in each cycle, high-level decides which skill to use based on world info. Then the skill to use decides the ball movement model .
e.g.
- searching -- static ball model, search high-weight cell first
- grab - static ball model, ready to use IR sensor, then ball's position is known to be below segway, so same velocity as the segway
- recv ball -- ball will be kicked towards the segway, so using constant speed model
- kick bal l(passing, shooting)-- segway will kick the ball, so ready to give a ball an acceleration
- aiming -- moving ball
- interception -- that is grab a moving ball, moving ball model -> stop ball
- vision
- IR sensor
- self motion
- teammate comm
- PF(particle filter)
- RBPF (pf + kalman filter)
- KF
- experiment comparing the three
Tuesday, March 01, 2005
[segway] Todos
- relations between behavior and tracking
- using tracking to help behavior
- HMM? rao-blackwellised pf (bayesian network)
- using tracking to help behavior
- don't look at ball's current position, look 2-4 cycles ahead depending on speed
- search positions with higher-weight-particle first when searching ball
- if we know we are going to kick, then give ball movement model an acceleration
- if we are going to grab, then ball is going to be stopped below
- IR sensor assures the ball is below
- HMM? rao-blackwellised pf (bayesian network)
[segway] Tracking Report II
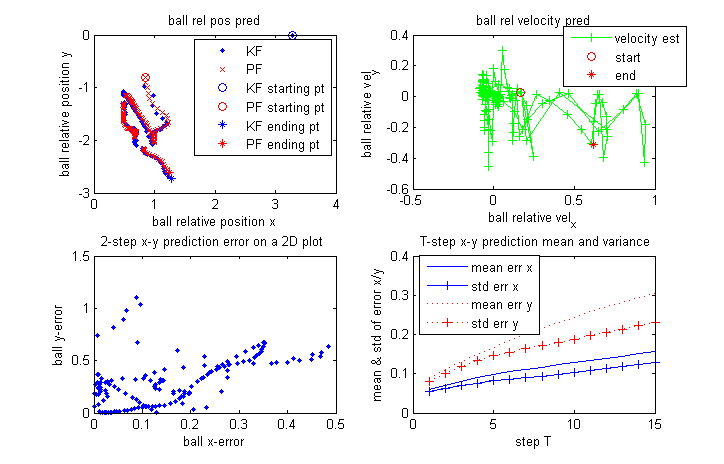
This tests a moving robot observing a moving ball.
Previous observation model is uncorrent. Below is the current model. I removed the external input and now the state variable x and observation variable y as well are under global coordinate. The ball decay does not work well, so we might want to replace it with just 1.0.
/* x(t) = A * x(t-1) + v(t-1)
* [ x1(t) ] = [ 1 0 .033 0 ] [ x1(t-1) ] + [ wx1 ]
* [ x2(t) ] [ 0 1 0 .033] [ x2(t-1) ] [ wx2 ]
* [ dx1(t) ] [ 0 0 .99 0 ] [ dx1(t-1) ] [ wdx1 ]
* [ dx2(t) ] [ 0 0 0 .99 ] [ dx2(t-1) ] [ wdx2 ]
*
* y(t) = C * x(t-1) + n(t)
* [ y1(t) ] = [ 1 0 0 0 ] [ x1(t-1) ] + [ vx1 ]
* [ y2(t) ] [ 0 1 0 0 ] [ x2(t-1) ] [ vx2 ]
* [ dx1(t-1) ]
* [ dx2(t-1) ]
*/
Subscribe to:
Comments (Atom)